
Taller de Robòtica LEGO Bogatell-Icària
juny-juliol 2009
Exploració del moviment (sense rodes)
L’exploració del moviment ha estat sempre un tema principal de recerca pels enginyers, per la robòtica i per la intel·ligència artificial. Per això, la replicació dels moviments d’animals i d’insectes, la còpia i inspiració en la natura, també ha estat sempre un motiu d’estudi que ha revelat estratègies de moviment que s’han aplicat a nombrosos enginys com ara robots bípedes o quadrúpedes, altres que imiten els insectes, braços mecànics amb pinces com els dels crancs, sistemes d’elevació o desplaçament per a indrets amb obstacles, etc. Sovint, entendre el moviment d’un animal i les fases de que es composa, com ara el d’un cavall, és una font molt rica d’idees que permeten dissenyar noves estratègies de moviment i, alhora, impliquen processos molt més creatius.
Un exemple històric de l’estudi del moviment és el que va fer l’Eadweard Muybridge el 1872, tractant de capturar amb la seva càmera el moviment d’un cavall de carreres, l’Occident, per esclarir si hi ha un instant, durant el trot i el galop, en que el cavall no recolza cap casc al terra (font wikipèdia).
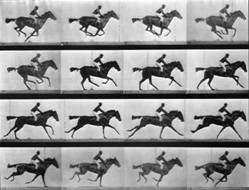
"Annie G" galopant, Eadweard Muybridge
Complete Human and Animal Locomotion, 1887
Els següents exercicis, que estan inspirats en els exercicis que proposa en Mike Rinderknecht, del Departament d’Informàtica del Laboratori d’Intel·ligència Artificial de la Universitat de Zurich a Suïssa, permeten als alumnes explorar els moviments a partir de la seva pròpia experiència i millorant les seves creacions o mecanismes a partir de l’estudi, similitud o comparació amb mecanismes naturals i animals.
Els exercicis són relativament ràpids, normalment es poden realitzar varis en una sessió, i molt efímers, ja que s’han de desmuntar per construir-ne els següents. Per això, un cop es realitza un exercici, cal fotografiar-lo, filmar el seu funcionament i documentar-lo per poder-lo reconstruir en el futur i generar un petit inventari de solucions. Cada mecanisme s’ha replicat en format digital amb el LEGO Digital Designer, la qual cosa permet tornar a reflexionar sobre el procés de construcció, la qual cosa sovint permet simplificar i millorar encara més el mecanisme. Com es podrà observar amb el funcionament de cada mecanisme, els programes que els accionen són extremadament senzills, es tracta més d’un exercici de reflexió i enginy constructiu que no pas de programació.
Curiosament, un dels reptes més importants i potser més difícils pels alumnes ha estat la simplificació de les seves creacions. Sovint la tendència natural és complexificar innecessàriament les construccions, i quan aquestes es contemplen un cop acabades, el procés de simplificació necessari per assegurar la comprensió de l’essència de cada moviment i mecanisme és una tasca més difícil del que sembla.
Primer exercici
El primer exercici tracta de construir un mecanisme sense rodes que vagi endavant durant uns segons, que sigui el més senzill possible, i només amb un sol motor. L’al·licient pels alumnes és que guanya el repte el mecanisme que tingui el menor número de peces.
Com es pot veure en els exemples, la primera intuïció és replicar una roda. Posteriorment, es fixen les pales de la pseudoroda de forma excèntrica al motor per tal d’intentar arrossegar el mecanisme i fins i tot, a nivell de programació, es realitza una petita modificació per tal d’evitar un gir de motor de 360 graus. Aleshores, el problema està en evitar el moviment de vaivé, i fer que el mecanisme vagi endavant. Per això, es col·loquen unes peces de goma en la part posterior que augmenten el fregament, etc. Un cop el mecanisme funciona s’intenta afegir-li el maó intel·ligent, per donar-li autonomia, el que comporta un altre nivell de dificultat, donat que el mecanisme és més pesat. El procés de depuració del mecanisme permet adonar-se de la possibilitat de desfasar el moviment dels suports, pales o potes fixades al motor, de tal manera que funcionin com els braços d’un nedador. Així, el mecanisme va més ràpid, encara que es balanceja d’un costat a l’altre, donant una certa inestabilitat, la qual cosa es convertirà en un problema, tal com veurem més endavant. Arribat aquest punt, comença el procés de complexificació dels suports o potes que es comencen a articular, per obtenir moviments més grans i més ràpids. És en aquest punt que comença l’analogia amb els animals i la natura...






Un dels mecanismes més simples, compactes i bonics que es van realitzar el primer dia és aquest arrossegador, que varem anomenar “esquiador”. Aquest mecanisme està format per només 6 peces o bigues (amb 12 connectors i 2 peces de goma). Com es pot observar, el motor acciona dues potes articulades als seus extrems, amb un moviment desfasat 180 graus, la qual cosa li permet avançar.


Els següents mecanismes, també articulats, s’assemblen més als dels insectes. Els alumnes aprenen que allargar els suports del mecanisme i convertir-los en potes permet un moviment més ràpid, donat que s’aprofita més la rotació del motor, i fins i tot, permet saltar petits obstacles, com ara la junta entre dues taules. També aprenen que un excés d’articulació pot ser contraproduent.
És interessant observar que durant el desenvolupament del taller es van produint efectes “bola de neu” que fan que quan un grup o un alumne descobreix un tipus de mecanisme, la resta de grups o d’alumnes s’inspiren en aquest nou tipus per desenvolupar-ne altres de diferents, construeixen a partir d’un nou descobriment. És molt important potenciar aquest efecte, que afavoreix la creativitat, el treball en equip i entre equips i el traspàs de coneixements.




De vegades un mateix mecanisme no funciona correctament en la posició inicialment dissenyada, però sí en una altra posició, que es descobreix casualment observant el mecanisme.









Una solució diferent passa per dissenyar un moviment basat en unes potes tipus “granota”, com mostren les imatges següents. Veiem com les potes més llargues permeten aprofitar millor les rotacions de motor i generen un moviment més ràpid.



Segon exercici
El segon exercici tracta de duplicar cada mecanisme i generar-ne un de nou però amb dos motors. En aquest punt, un aspecte important és intentar incorporar el maó intel·ligent, per donar més autonomia al mecanisme. En aquest exercici els alumnes aprenen la importància del sincronisme entre motors i potes, la necessitat de col·locar el centre de gravetat del mecanisme el més baix possible, l’efecte negatiu del balanceig, i han de decidir si connecten els motors en el mateix sentit o al inrevés, etc.
Les següents imatges mostren l’evolució de les articulacions del primer mecanisme anterior. Com es pot observar en els vídeos, l’excés d’articulació dificulta el moviment, i cal dissenyar una solució que contingui, al menys, dos eixos mòbils articulats i que aporti la major verticalitat possible a cadascuna de les quatre potes, per aprofitar millor les rotacions del motor.


El següent exemple mostra el funcionament del mateix mecanisme amb els motors sincronitzats rodant en paral·lel i desfasats 180 graus.

Com s’ha comentat anteriorment, el moviment de vaivé pot desequilibrar el mecanisme, i per tant, calen estratègies que impedeixin que caigui però que no limitin el seu moviment.





Un avanç important del mecanisme és l’intent d’afegir-li el maó intel·ligent, per donar-li autonomia. Les condicions canvien enormement, per una banda el centre de gravetat està més amunt i per l’altra, el mecanisme augmenta considerablement de pes. Aquests dos canvis impliquen que el moviment de vaivé pot ser crític i cal dissenyar estratègies per contrarestar-los. En el cas de les imatges següents es pot veure com el mecanisme inicialment cau, però al afegir-li quatre potes fixes, a mena d’aranya, funciona perfectament.




No sempre els mecanismes responen al que desitgem..., i de vegades el pes ajuda al moviment.

![]()